Liikennefysiikkaa
Turun klassillisen lukion liikennefysiikan kurssi, nimestään huolimatta ei ole pelkästään fysiikkaa, vaan kaikkea liikennepsykologiasta ohjelmointiin ja liikennesuunnitteluun. Kurssilla on tarkoitus antaa kuva siitä mitä liikenne on tänään, tulevaisuudessa ja kuinka liikennesuunnittelulla voidaan vaikuttaa käytettäviin liikennemuotoihin. Kurssi toteutettiin yhteistyössä Turun liikennesuunnittelutoimiston, Lounais-Suomen LUMA-keskuksen ja Turun AMK:n moottorilaboratorion kanssa.
Kurssilla aloitettiin pohtimalla liikennekäyttäytymistä ja etenkin omaa käyttäytymistä osana liikennettä. Mikä vaikuttaa vaaratilanteisiin ja miksi. Tämä osio pelkästään olisi jo oma kurssin aihe, sillä nyt vasta raapaistiin pintaa. Asennoituminen liikenteeseen vaikuttaa myös valittavaan liikennemuotoon ja autojen kohdalla valittavaan auton tekniikkaan. Seuraavana olikin kurssilla aika tutustua erilaisiin vaihtoehtoihin perinteisten bensiini- ja dieselkäyttöisten autojen rinnalle.
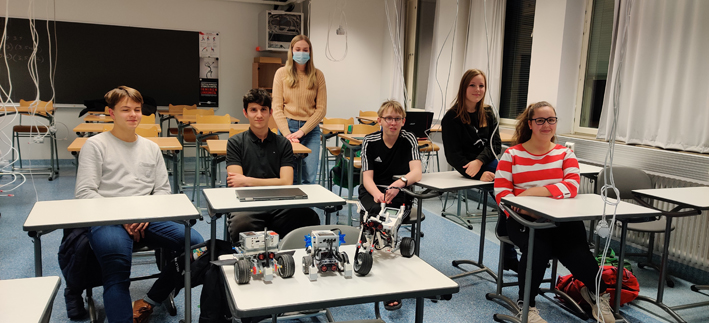
Tästä alkoikin kurssin tekninen osuus, kun kurssilaiset tutustuivat myös itseohjautuvien autojen tekniikkaan antureihin ja ohjelmointiin omassa ohjelmointiprojektissa. Ohjelmointiprojektista tuli myös osittain mekaanisten ongelmien ratkaisemista, kun Legoista piti saada rakennettua robottiauto (tai autonominen kulkuneuvo), joka pystyy kääntymään. Loppujen lopuksi ongelmat selätettiin ja robotit kulkivat annetun radan itsenäisesti, tosin samalla havaittiin myös anturitekniikan rajallisuus, eli jos anturi ei tunnista värejä oikein on mahdotonta saada ohjelmaa oikein.
Tähän liikennetekniikan osioon kuului myös virtuaalivierailu Turun AMK:n moottorilaboratoriossa ja vierailun aikana tutustuttiin tarkemmin polttomoottoreiden ominaisuuksiin ja siihen mitä ominaisuuksia tulee moottorilla olla, jotta se toimisi parhaiten sille määrättyyn työhön: miten linja-auton moottori eroaa henkilöauton moottorista ja miksi.
Robottiauton ohjelmoinnin ja mekaanisten ongelmien ratkaisemisen jälkeen siirryttiin liikennesuunnitteluun ja liikenteen dynamiikan pohtimiseen. Käytännössä perimmäisinä kysymyksinä oli, miten muodostuu ruuhka ja voidaanko liikennesuunnittelulla vaikuttaa ruuhkien muodostumiseen. Tähän kohtaan voi mainita myös, että Turku on Suomen ruuhkaisin kaupunki tilastojen mukaan, sillä Turussa henkilö istuu ruuhkassa kaikkiaan 38 tuntia vuodessa. Maailman tilastoiduista kaupungeista Turku oli vuonna 2019 juuri ja juuri 300 ruuhkaisimman kaupungin joukossa. Tosin maailman ruuhkaisimpaan kaupunkiin verrattuna Turussa liikutaan nopeasti, sillä Bogotassa henkilö istuu ruuhkassa kaikkiaan 191 tuntia vuodessa eli käytännössä 5 viikon työtunnit. Vierailu Turun kaupungin liikennesuunnittelutoimistossa (virtuaalinen) antoi hyvä kuvan Turun kaupungin liikennesuunnittelun perusteista sekä mitä tulevaisuus tuo tullessaan. Tästä alkoikin opiskelijoiden omien liikennesuunnitelmien pohdinta.
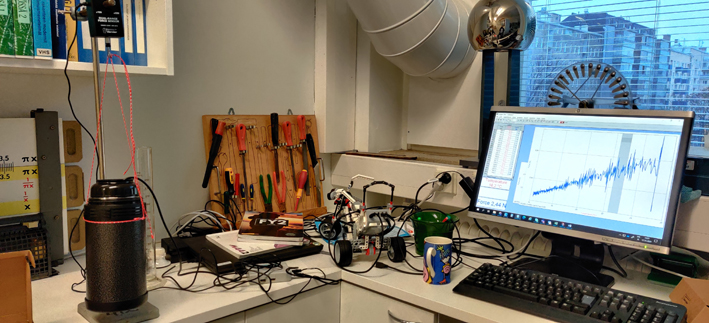
Viimeisenä kurssin aiheena olikin sitten tuttuakin tutumpaa fysiikkaa kitkaa, impulssia ja liikemäärää sekä törmäyksiä. Käsitteisiin tutustuttiin kokeiden kautta. Tehtiin erilaisia törmäyksiä, mitattiin autonrenkaan liukukitkaa ja tutkittiin pyöräilykypärän vaikutusta pään vammautumiseen. Tähän pyöräilykypärätestiin käytettiin apuna vesimelonia ja paria vanhaa fysiikan opettajan pyöräilykypärää. Tähän huipentui kurssi ja lopuksi käytiinkin läpi jokaisen kurssilaisen oma liikennesuunnitelma. Suunnitelmat olivat monipuolisia ja niissä oli vahvasti mukana joukkoliikenteen jouhevuus ja yksityisen autoilun pienentämisen tavoite.
Jaani Paski